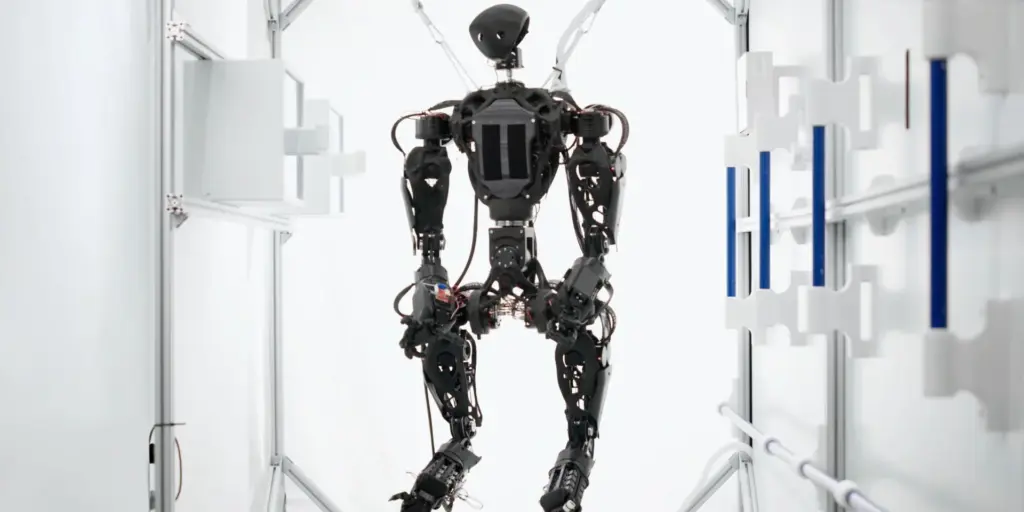
Uzay teknolojileri alanında faaliyet gösteren Orbit Robotics, mikro yerçekimi koşulları için geliştirdiği dört kollu Helios robotunu tanıttı. Bu yenilikçi sistem, geleneksel insansı robot konseptinden uzak durarak doğrudan uzay istasyonlarının zorlu fiziksel koşullarına uygun olarak tasarlandı. Helios’un temel amacı, astronotların bakım ve lojistik görevlerini üstlenerek, onların bilimsel çalışmalara daha fazla zaman ayırmasını sağlamaktır. Ayrıca, bu robotlar, uzay ortamında insan müdahalesini azaltma ve operasyonları daha güvenli hale getirme konusunda önemli avantajlar sunuyor. Uluslararası Uzay İstasyonu’nda veya gelecekte kurulacak diğer orbital yapılarında, insanların yerine veya onlarla birlikte çalışmaya uygun tasarımlarla donatılan Helios, uzay teknolojilerinde yeni bir dönemin habercisi olmayı hedefliyor.
Mikro Yerçekiminde Hareket Kabiliyeti
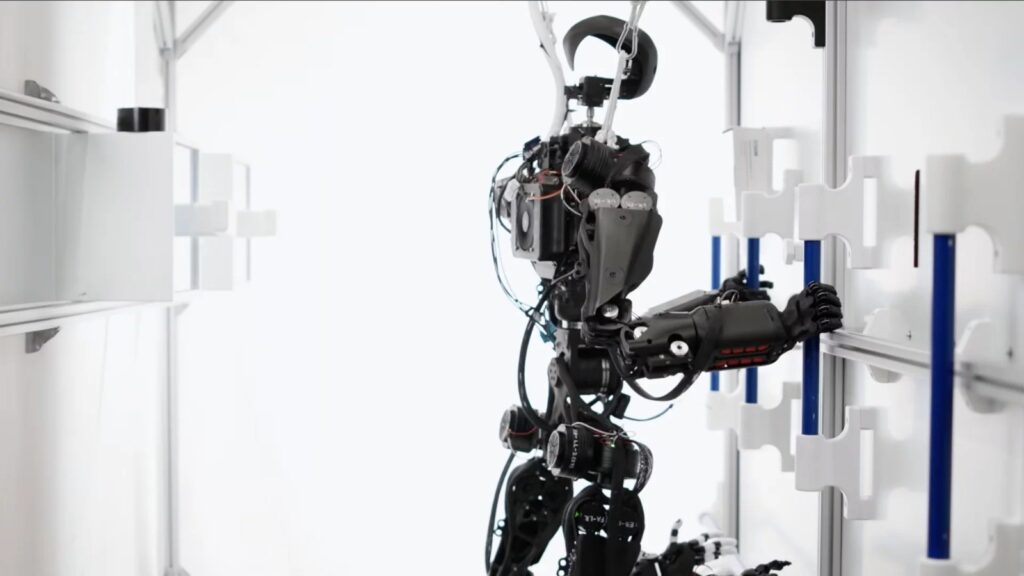
Geliştirilen bu robotlar, mikro yerçekimi ortamında hareket etme ve denge sağlama konusunda önemli iyileştirmeler içeriyor. Uzay ortamında hareket etmek, Dünya’daki gibi yürümek veya denge kurmak imkânsız hale gelir çünkü her temas, nesnelerin ve insanların hareket durumunu olumsuz şekilde etkileyebilir. Bu nedenle Helios’un tasarımında bacaklar tamamen devre dışı bırakılmıştır. Robotun iki kolu, yüzeyle stabil bir şekilde tutunurken, diğer iki kolu ise özellikle evrensel olarak kullanılabilen ekipman taşıma, kargo boşaltma ve araç kullanımı gibi çeşitli operasyonel görevleri yerine getirir. Bu yapı, özellikle dar ve kapalı alanlarda çalışan uzay istasyonlarındaki görevlerde, robotun aynı anda hem stabil kalmasını hem de hassas işlemler yapmasını mümkün kılarak, operasyonel verimliliği artırıyor.
Helios’un Geleneksel Robotlardan Farklı Tasarım
Helios’un geliştirilmesinde kullanılan mühendislik yaklaşımı, geleneksel humanoid robot anlayışının uzay için uygun olmadığını öne sürüyor. Dünya’daki robotlar genellikle insan anatomisini taklit ederek tasarlanırken, mikro yerçekiminde iki bacaklı yapılar, kullanım açısından verimlilik açısından pek anlamlı değil. Bu nedenle Orbit Robotics mühendisleri, robotu daha çok bir astronot gibi değil, uzay ortamını en iyi şekilde kullanacak bir bakım ve destek aracı olarak tasarladı.
Tendon Tahrikli Hareket Sistemi
Mekanik yapısındaki en belirgin özelliklerden biri, tendon tahrikli hareket sistemidir. Geleneksel robotlarda motorlar eklemlere doğrudan entegre edilirken, Helios’ta büyük motorlar omuz bölgesine yakın konumlandırılmıştır. Bu motorlar, kablolar ve makaralar aracılığıyla kollara güç aktarır. Böylece, robotun uç kısımlarındaki uzuvlar daha hafif ve çevik olur. Ayrıca, hareket sırasında oluşabilecek atalet etkileri ve kontrol karmaşıklığı minimize edilir. Bu sayede, robotun hassas görevlerde, örneğin ekipman manipülasyonu veya küçük nesnelerin yerleştirilmesi gibi işlemlerde yüksek stabilite ve hassasiyet sağlanır.
Hassas Görevler İçin Özel Dirsek Mekanizması

Dirsek yapısında kullanılan yuvarlanan temas mekanizması da uzay ortamının özelliklerine göre optimize edilmiştir. Dünya yüzeyinde, robotların titreşimi veya küçük sarsıntılar çoğu zaman sorun oluşturmazken, uzayda en küçük titreşimler bile robotun dengesini bozabilir ve görevlerin aksamasına neden olabilir. Bu nedenle, Helios’un eklem sistemi, kontrollü ve yumuşak hareketler sağlayacak şekilde tasarlandı. Bu yapısal özellik, robotun belirli ve hassas ekipmanlarla çalışırken dahi stabil kalmasına ve güvenli bir operasyon yapmasına imkan tanıyor.
IKARUS Platformundan Helios’a
Helios’un geliştirilme süreci, sıfırdan başlamadı. Orbit Robotics, daha önce IKARUS adında bir deneme platformu üzerinde çalıştı. Bu platform, uzaktan kontrol, çift kollu manipülasyon, taklit öğrenme gibi teknolojilerin geliştirilmesine olanak sağlayan detaylı bir test ortamı sundu. IKARUS’un deneyimleri, Helios’un mekanik ve yazılımsal mimarisinin şekillendirilmesinde temel rol oynadı. Bu sayede, şirket teorik konseptleri doğrudan gerçek bir uzay robotuna uygulamadan önce, çeşitli testler ve iyileştirmelerle sistemlerin sağlamlığını ve verimliliğini artırdı.
Uzay Araştırmalarında Yeni Dönem

Uzay istasyonlarında bakım görevlerinin maliyetleri oldukça yüksektir. Veriler, bu işlemlerin toplam bakım süresinin yaklaşık %35’ini oluşturduğunu gösteriyor. Astronotların saatlik maliyetinin yaklaşık 140 bin dolar civarında olduğu dikkate alındığında, tekrar eden lojistik ve bakım görevlerinin operasyonel maliyetleri önemli boyutlara ulaşabiliyor. Bu noktada, Helios ve benzeri robotların, görevleri insan yerine üstlenerek hem maddi hem de zaman açısından büyük avantajlar sağlayabileceği öngörülüyor. Ayrıca, robotların hassasiyetleri sayesinde, hata oranları azalırken, görevlerin daha hızlı ve güvenli şekilde tamamlanması bekleniyor.
Sonuç olarak, Helios’un geliştirilmesi, uzay ajanslarının bakım süreçlerindeki verimliliği artıracak, maliyetleri düşürecek ve uzay araştırmaları alanında yeni ilerlemelerin önünü açacaktır. Bu teknolojik gelişme, insan-makine iş birliğinin uzay ortamında yeni bir boyut kazanmasına önemli katkılar sağlayacak ve gelecekteki derin uzay görevleri için de temel bir altyapı oluşturacaktır.




{kind=link}